14. 如何赋予 LLM 规划能力?
14. 如何赋予 LLM 规划能力?
👔面试官:说说你是怎么给 LLM 加规划能力的?
🙋♂️我:规划能力主要靠 CoT,就是在 prompt 里加一句「请一步步思考」,让 LLM 把推理过程写出来,就有规划能力了。
👔面试官:CoT 就是规划能力的全部?你有没有想过 CoT 最大的问题是什么?
🙋♂️我:CoT 的问题……就是有时候推理链比较长,token 消耗多一些?
👔面试官:不对。CoT 是单条推理链,一旦一开始方向走错,后面全错,没有任何纠偏机制。ToT 就是为了解决这个问题才出来的,你知道 ToT 怎么做的吗?
🙋♂️我:ToT 是同时生成多条推理链,然后选最好的那个,类似于 beam search 的思路?
👔面试官:方向对,但不够准确。ToT 不是最后才选,而是边探索边评估边剪枝,是一个循环的过程。那 GoT 又比 ToT 多解决了什么问题,你说说看?
被问到这里,才发现「加个 CoT 就是规划能力」这个认知太浅了。三种机制是层层递进的,搞清楚每一步在解决什么问题,才是真正理解了规划能力。
💡 简要回答
给 LLM 加规划能力主要靠这几种思路。
CoT 是让 LLM 把推理步骤写出来,线性地一步步推导到答案;
ToT 是让它同时探索多条推理路径,选最优的继续深入;
GoT 是图结构推理,推理节点可以复用和合并,适合更复杂的任务。
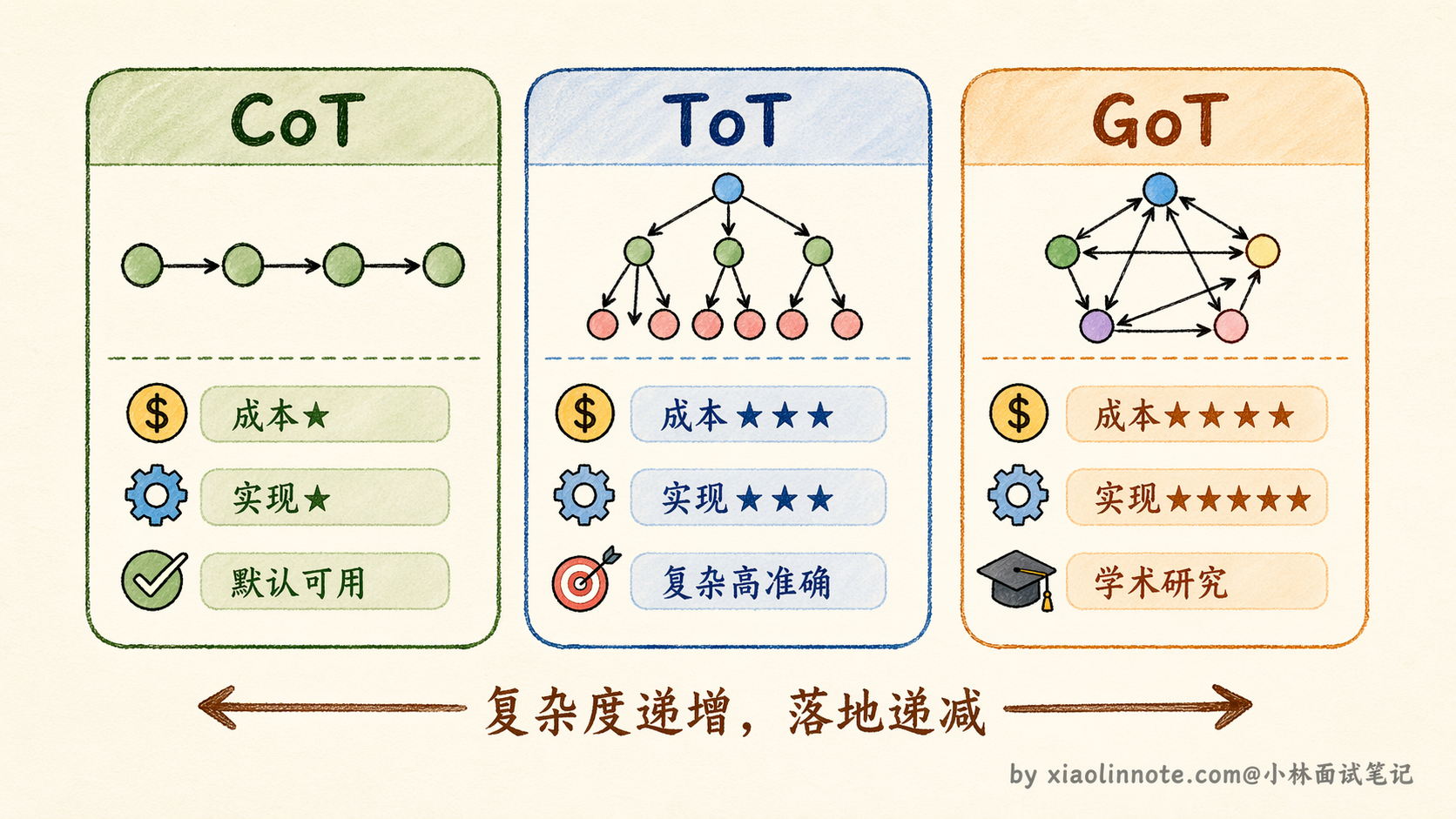
工程上我用 CoT 最多,因为实现成本最低,就是改个 prompt;ToT 效果更好但调用次数多,成本大概是 3 到 5 倍;GoT 目前还比较学术,生产环境我没见过有人真正落地用的。
📝 详细解析
要理解为什么需要规划能力,先看 LLM 在没有任何规划机制时是怎么运作的。
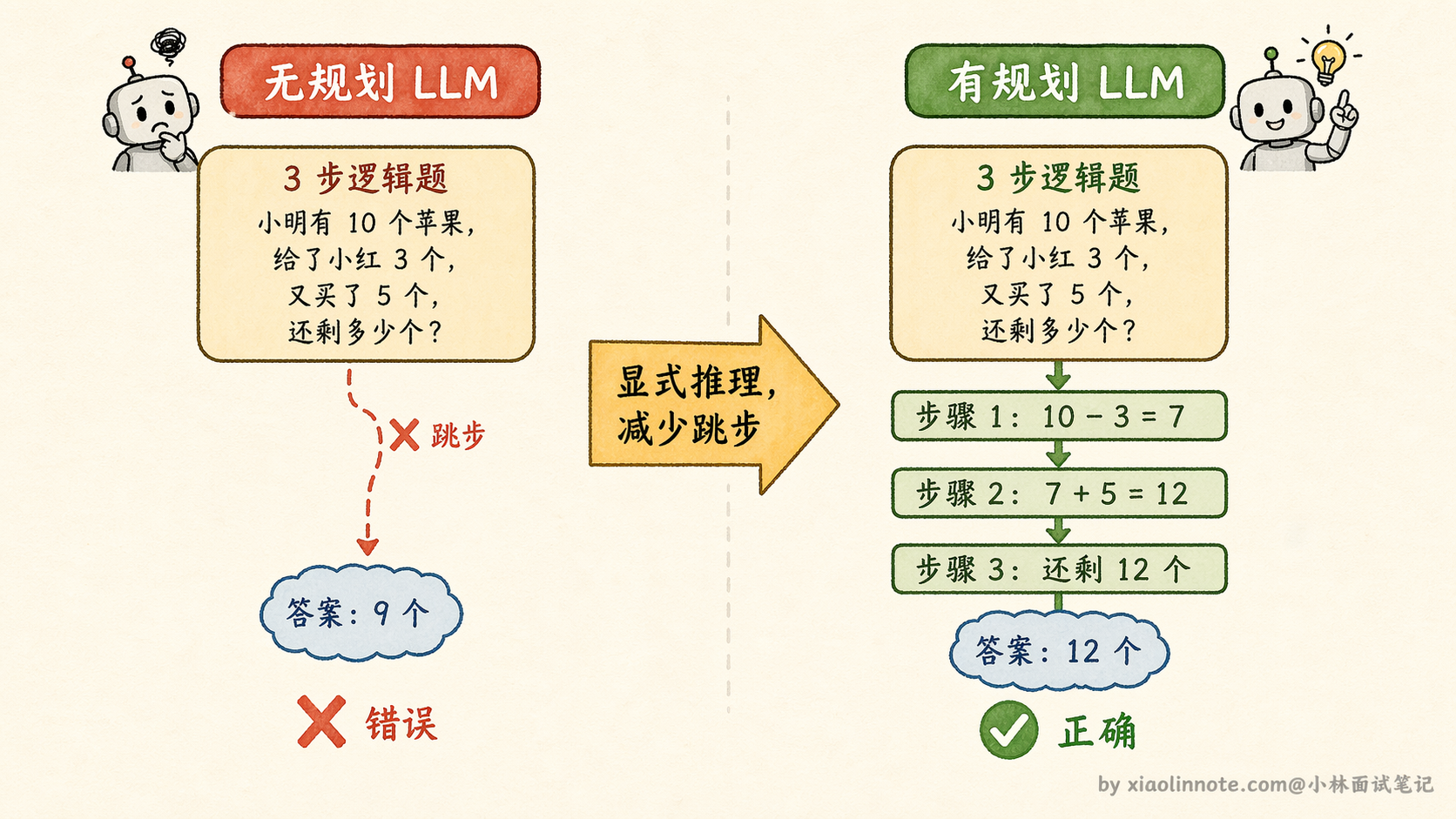
普通的问答模式下,LLM 接到一个问题,就直接「一口气」生成答案,中间没有任何推理过程。这对简单问题没啥大问题,但遇到需要多步推导的任务就很容易翻车。
比如让它做一道需要 3 步推导的逻辑题,如果直接让它给答案,出错概率会远高于让它把每步都写出来。
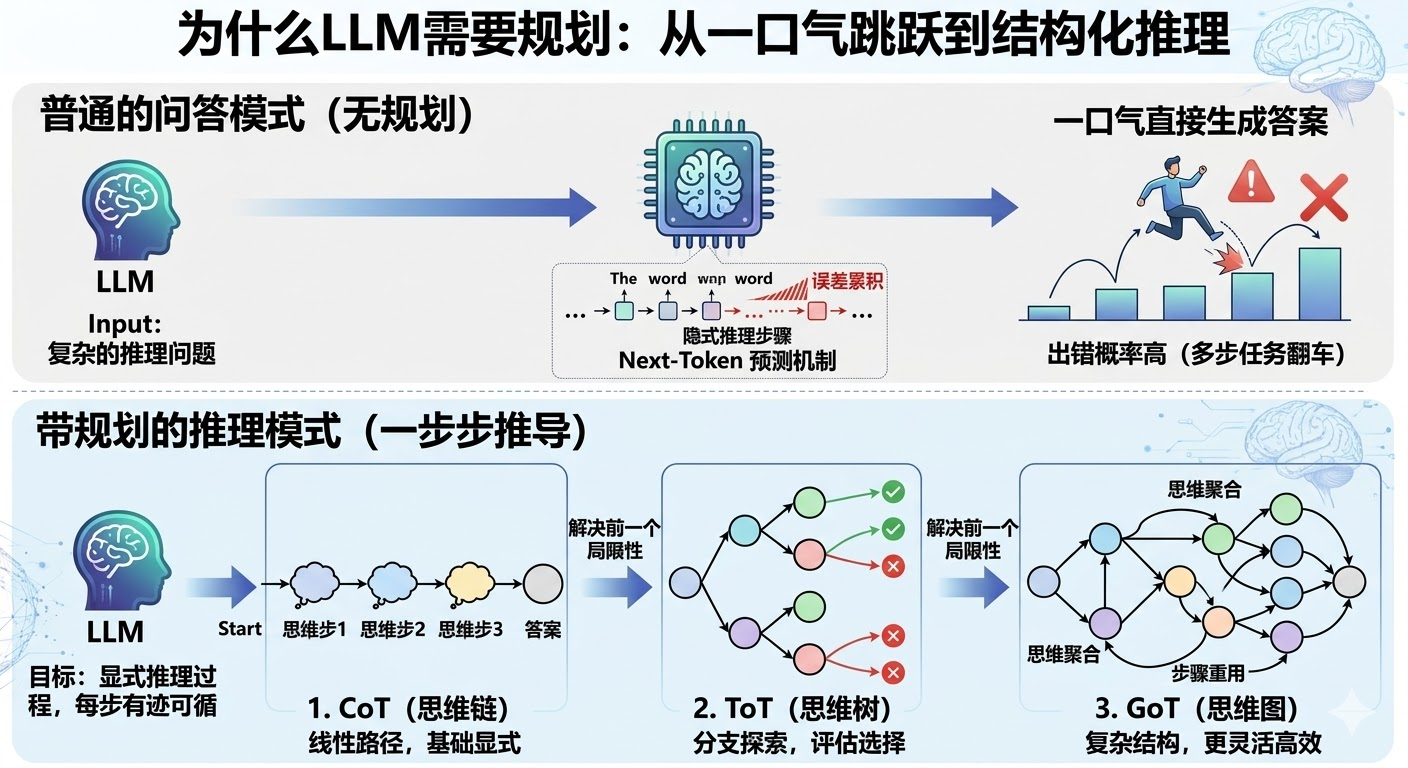
背后的原因是 Transformer 的 next-token 预测机制,每个 token 是基于前面所有 token 生成的,推理链越长、隐式的跳步越多,误差就越容易在中间某一步悄悄累积,最后给出一个看起来很自信但其实是错的答案。
「规划能力」要解决的就是这个问题:把 LLM 隐式的推理过程显式化,让它不再是「一步跳到答案」,而是「一步一步推到答案」,每步都有迹可循。
CoT、ToT、GoT 是这个方向上依次演进的三种方案,每一个都在解决前一个的局限性。
CoT:最简单的激活方式,加一句话就够了
CoT 的全称是 Chain of Thought(思维链),核心思路极其简单:在 prompt 里加一句「请一步步思考」,LLM 就会把推理过程逐步写出来,而不是直接蹦出答案。
为什么这么简单的改变就有效?
本质是因为 LLM 的输出是顺序生成的,当它先输出推理步骤,这些推理内容会进入上下文,影响下一个 token 的生成。换句话说,「写下来的推理过程」本身就成为了后续生成的依据,帮助 LLM 不跳步、不乱想。就好比你在纸上演算数学题,把每一步写出来之后,下一步出错的概率会比在脑子里算要低得多,原理是一样的。
CoT 有两种触发方式。
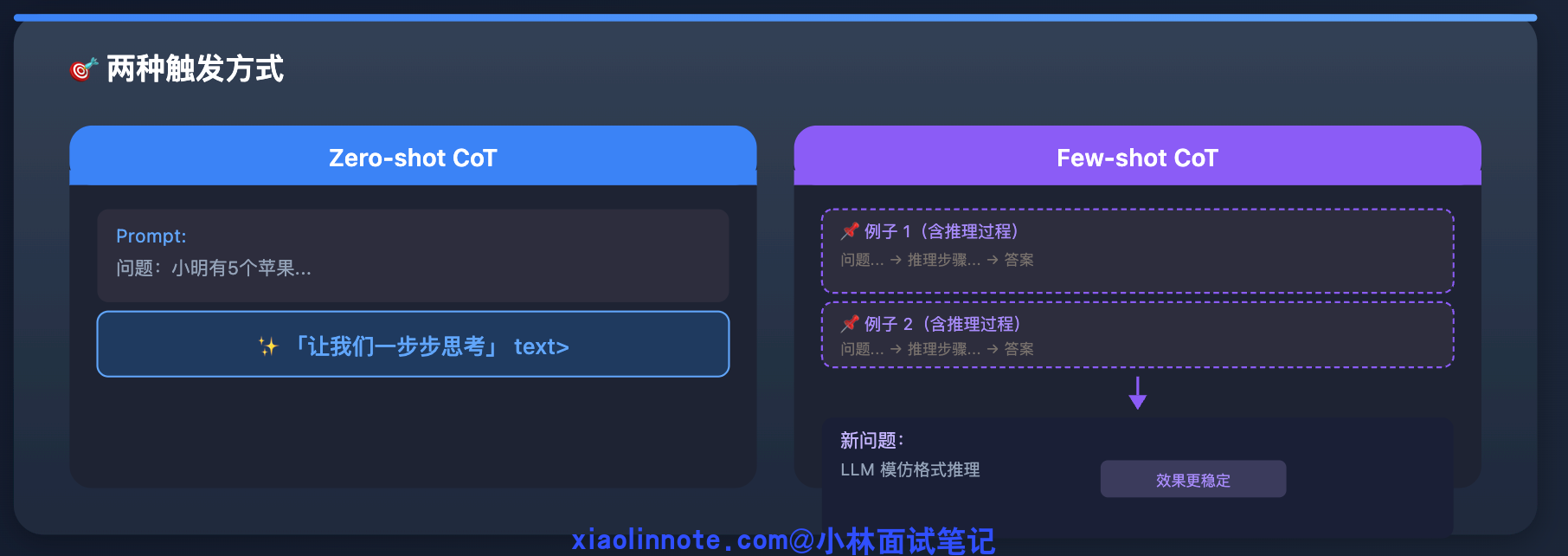
- 第一种叫 Zero-shot CoT,就是直接在 prompt 末尾加「让我们一步步思考」,LLM 自己展开推理,不需要额外例子;
- 第二种叫 Few-shot CoT,给几个带有完整推理过程的例子,让 LLM 模仿这种推理格式来回答新问题,效果通常更稳定。
CoT 的局限很明显:它只有「一条推理路径」。如果一开始走错了方向,整条链就歪了,没有任何纠偏机制。

ToT:从「一条链」到「一棵树」,解决走错方向的问题
ToT 的全称是 Tree of Thoughts(思维树),针对的正是 CoT「一旦走错就全错」的问题。
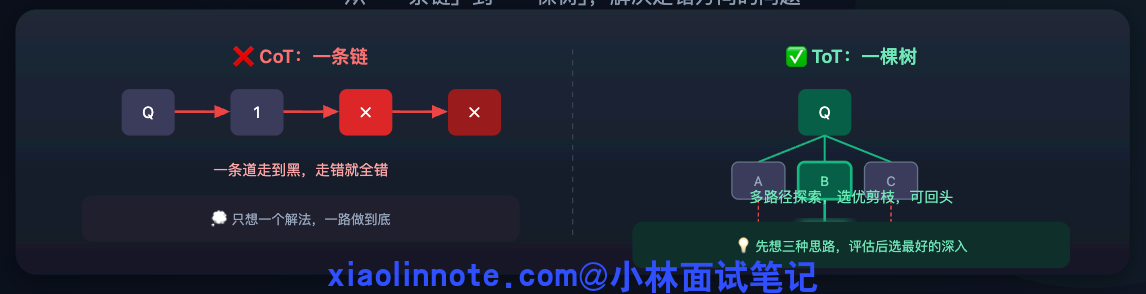
核心改变是把「生成一条推理链」变成「同时探索多条推理路径,边探索边剪枝,最终选出最优路径」。用一个生活类比来理解:CoT 像你做题时只想了一个解法,一路做到底;ToT 像你先想了三种可能的解题思路,评估了一下哪种最靠谱,选了最好的那条继续深入,另外两条直接放弃。
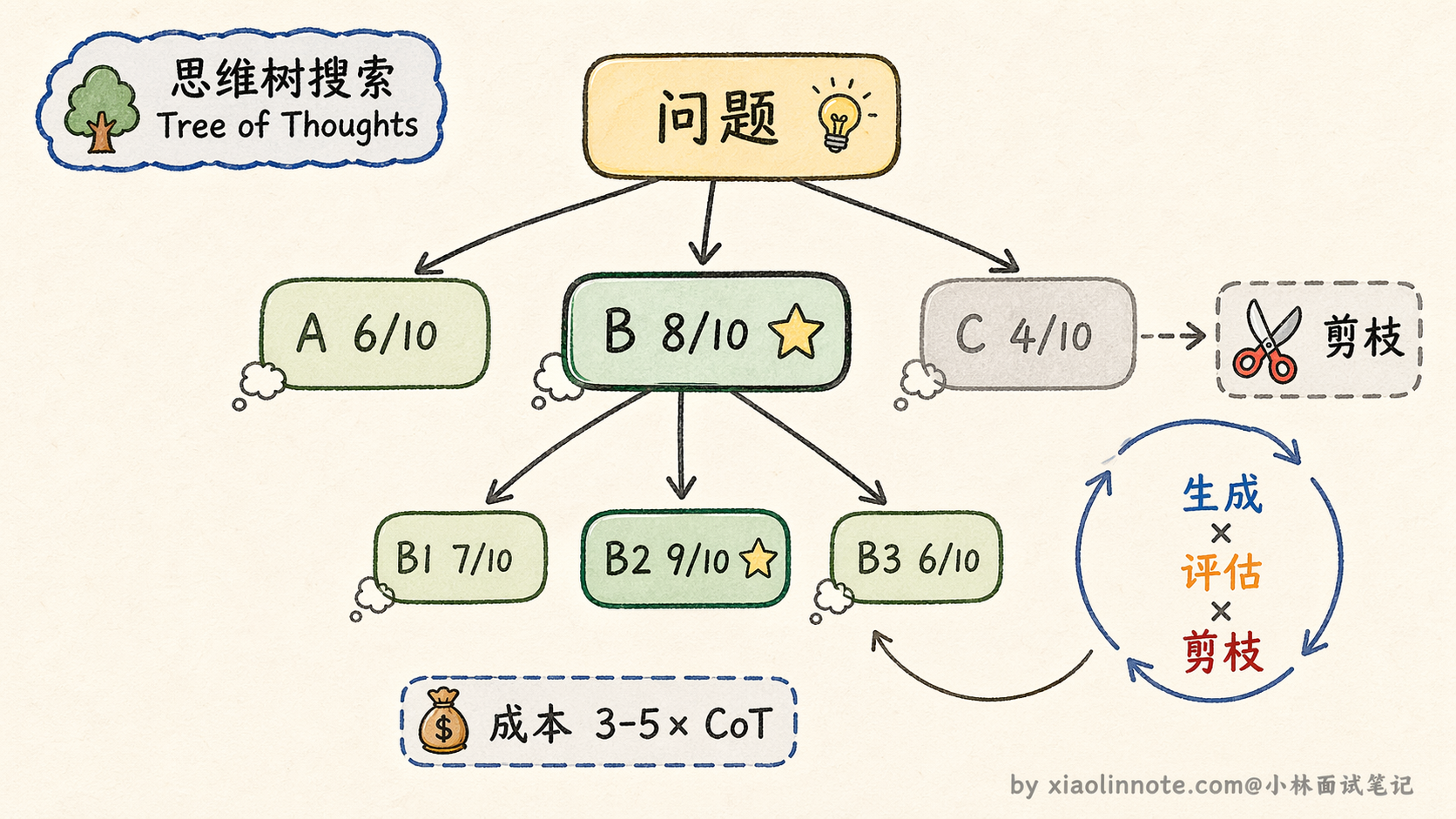
ToT 的执行流程可以分三步来理解。
首先是生成多个候选思路,让 LLM 针对同一个问题给出 3 个不同的初步方向,而不是只走一条路。
然后是评估每个思路的可行性,用另一个 LLM 调用(或同一个 LLM 带上评估 prompt)给每个思路打分,判断哪个最有希望。
最后是选优继续深入、剪掉差的,只保留分数高的思路,再展开下一层推理,反复循环直到得出最终答案。

这个「生成 -> 评估 -> 剪枝」的循环,让 LLM 不再是「一条道走到黑」,而是有了探索多条路、选好的走、发现走错了还能回头的能力。代价也很明显:原来 CoT 一次生成就搞定,ToT 需要多次 LLM 调用(多条路径 × 多层深度 × 每层还要评估)。具体多几倍要看路径数和搜索深度:典型设置(每层 3 条路径、搜 2-3 层)下成本通常是 CoT 的 3-5 倍;极端场景(深搜、更多路径、每步都打分)可能到 10 倍以上。
GoT:从「树」到「图」,解决推理结果不能复用的问题
GoT 的全称是 Graph of Thoughts(思维图),是在 ToT 基础上再进一步的进化。
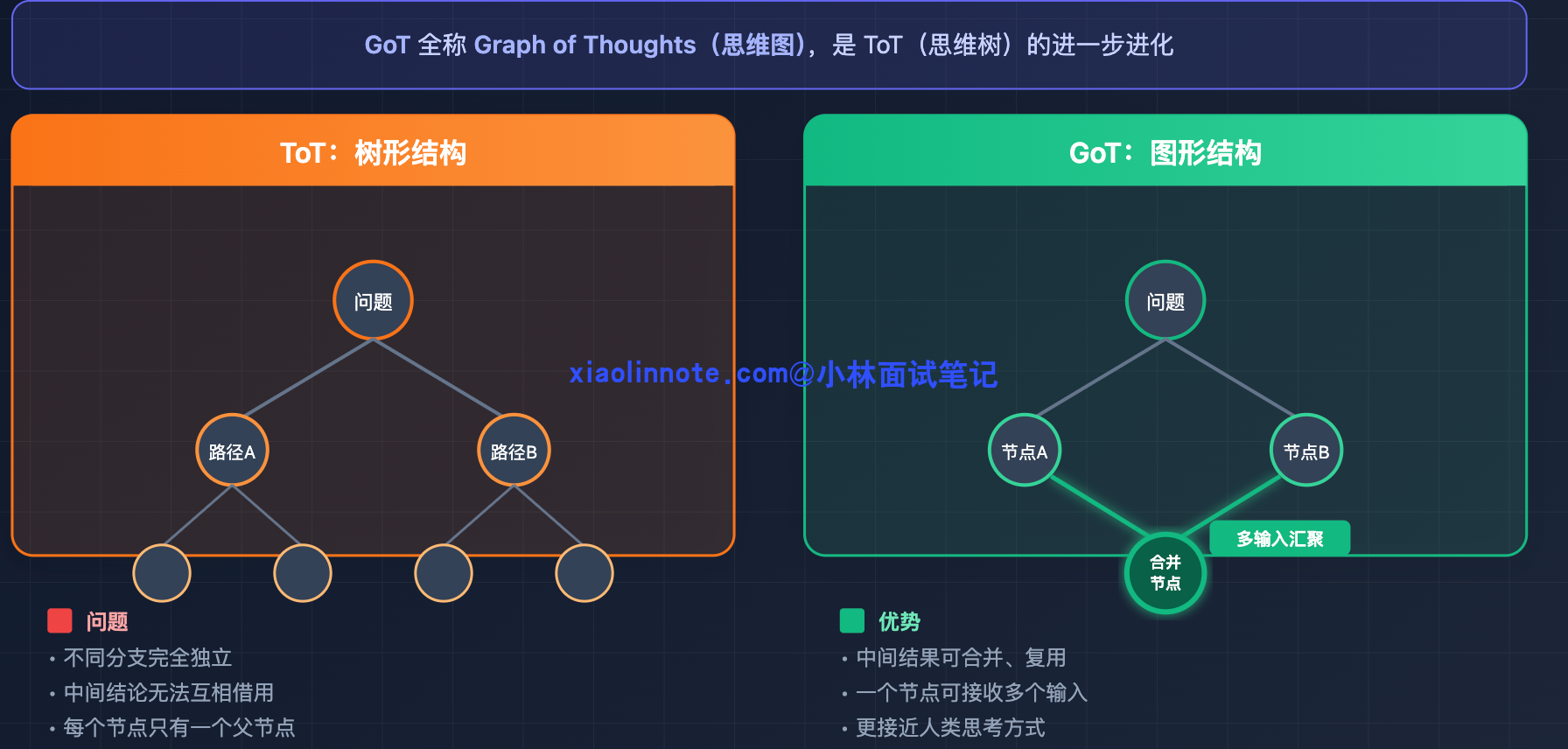
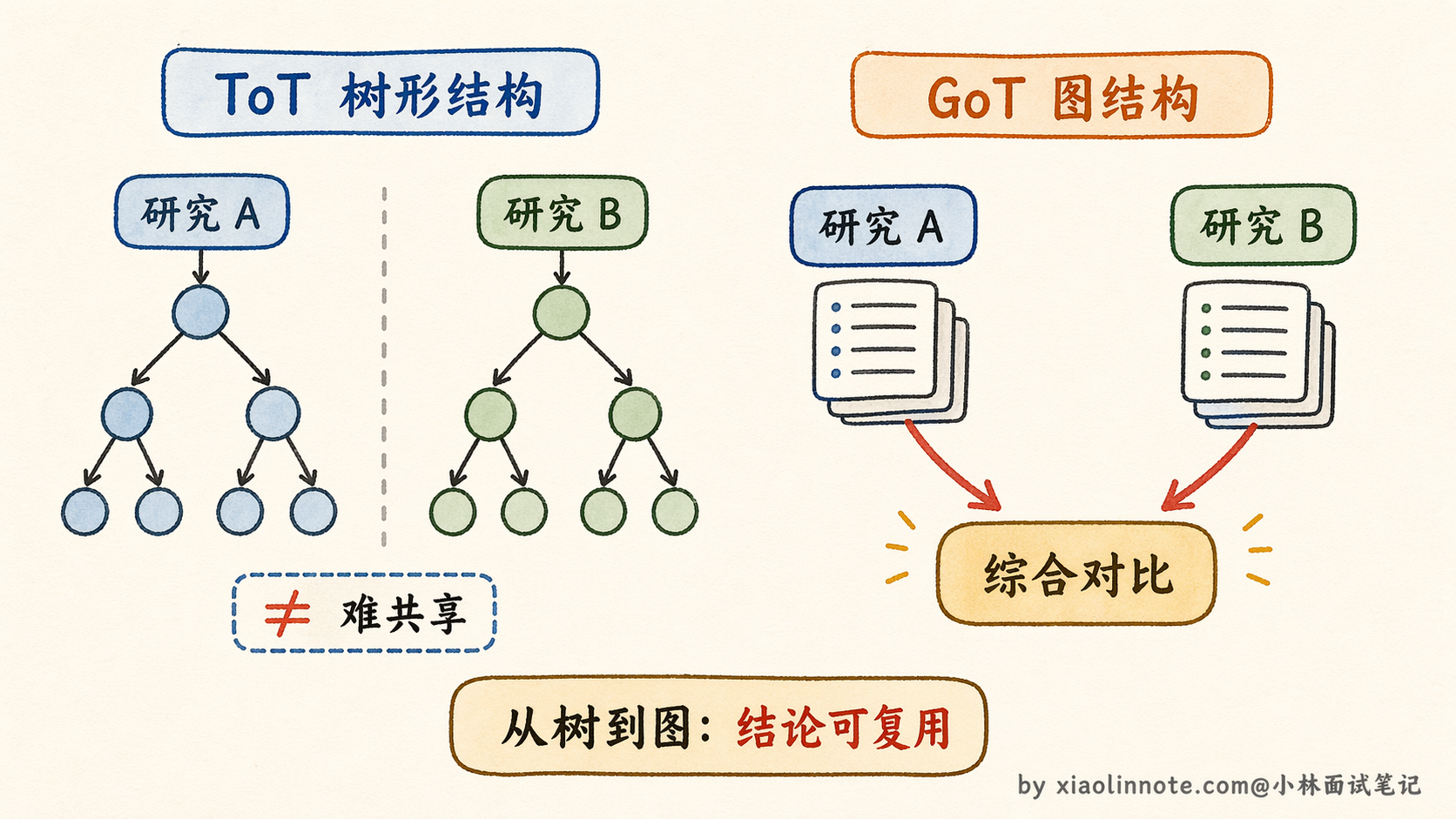
ToT 虽然引入了多路径探索,但它是树形结构,不同分支之间完全独立,两条推理路径上的中间结论无法互相借用。GoT 把推理结构换成了图,允许不同路径的中间结果合并、复用,也就是说一个推理节点可以接收来自多个前置节点的输出作为输入。
举个具体例子:如果任务是「分别研究竞品 A 和竞品 B,然后做综合对比分析」。ToT 里研究 A 和研究 B 是两条独立的路径,各自得出结论;但「综合对比分析」这一步需要同时用到两条路径的结论,在树形结构里很难自然表达,因为树的每个节点只有一个父节点。
GoT 的图结构允许把「研究 A 的节点」和「研究 B 的节点」的输出,汇聚到「综合对比分析节点」,这种「多个中间结论合并输入到下一步」的操作在图里是一等公民,表达起来非常自然。
GoT 能建模的推理模式比 ToT 更丰富,也更接近人类实际处理复杂任务的思考方式。但落地复杂度很高,目前主要还是学术研究场景,生产环境里极少见到真正用起来的。
三者的演进关系
把这三者放在演进视角里看,逻辑非常清晰。
CoT 解决了「要不要把推理显式化」的问题,答案是要,把过程写出来就能显著减少跳步出错。ToT 解决了「走错方向怎么办」的问题,答案是先多探索几条路,边走边评估边剪枝。GoT 解决了「不同推理路径的中间结论能不能复用」的问题,答案是把结构从树换成图,自然支持结论汇聚与复用。每一步都是在前一步的基础上发现局限、针对性改进。
工程上怎么选?CoT 几乎是所有任务的标配,加一句话、零成本,直接加到 system prompt 里就行。ToT 在准确率要求很高、任务比较复杂的场景值得考虑,但要做好调用成本增加 3-5 倍(极端情况更多)的心理准备。GoT 目前工程落地不成熟,主要了解它的思想即可,真实项目里不必强行引入。
工程里真正常用的规划模式:Plan-and-Execute
CoT、ToT、GoT 说的都是「怎么让 LLM 把推理过程做得更好」,但在真实的 Agent 项目里,还有一种更贴近工程实践的规划模式,叫做 Plan-and-Execute(先规划再执行)。
这个模式的思路很直白:面对一个复杂任务,先让 LLM 制定一份完整的执行计划,把任务拆成若干步骤,然后一步一步执行,每完成一步就检查一下进度,必要时调整后续计划。你可以把它理解成「先写大纲再动笔」的写作方式,而不是拿到题目就开始一口气往下写。
为什么需要这种模式?因为 CoT 虽然能让 LLM 逐步推理,但它是「边想边做」的,走到哪算哪,没有全局视角。对于一个需要调用多个工具、经历多个环节的复杂任务来说,如果没有一个整体规划,LLM 很容易在某一步跑偏,后面的步骤全都白费。Plan-and-Execute 的核心价值就是:先用一次 LLM 调用建立全局视角,再用后续调用逐步落地,把「规划」和「执行」分成两个阶段来做。
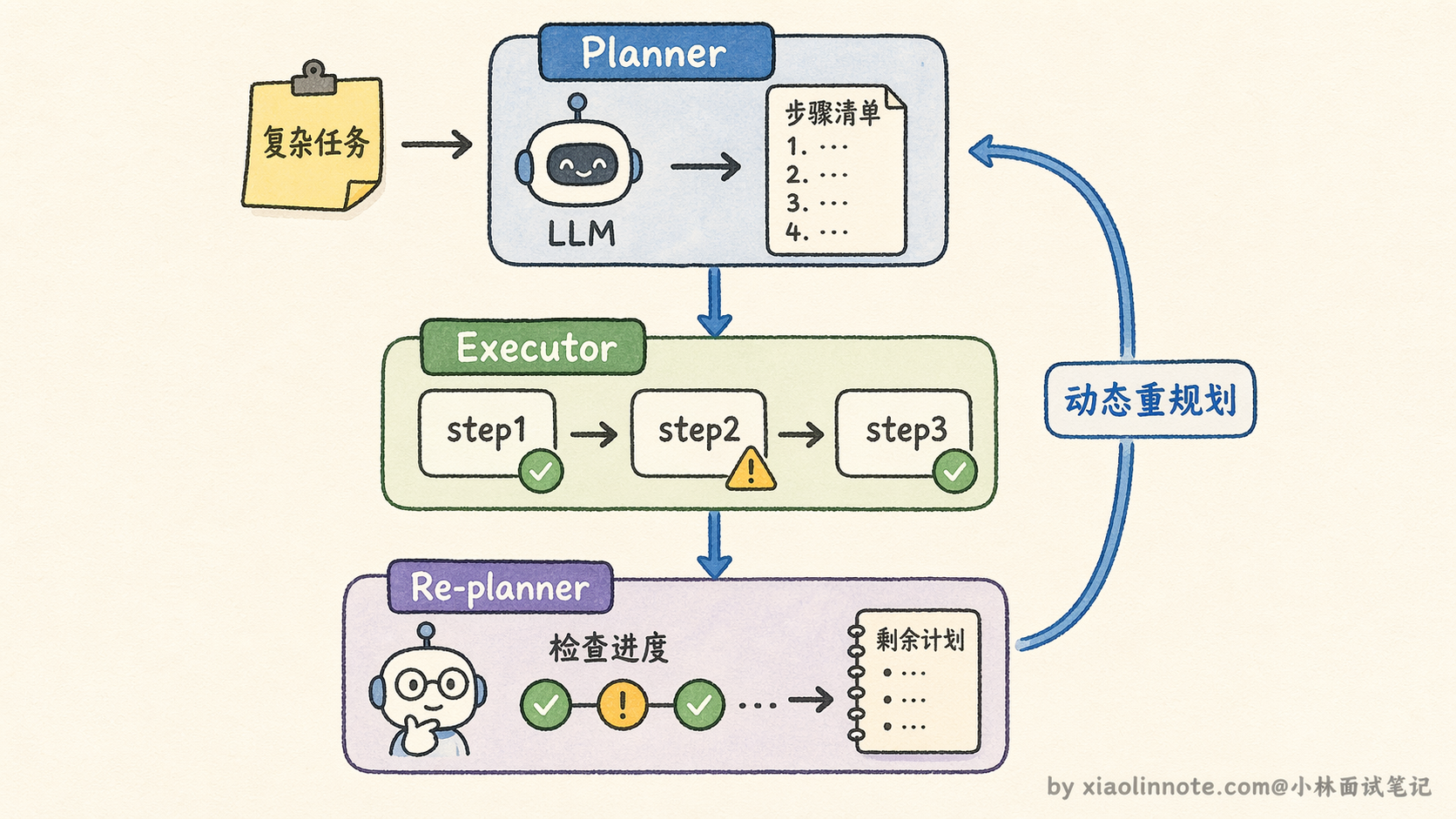
具体执行流程分三步。
- 第一步,Planner(规划器)接收用户任务,生成一份步骤清单,比如「第一步搜索相关资料,第二步整理关键信息,第三步撰写总结报告」。
- 第二步,Executor(执行器)按照清单一步步执行,每步可能涉及工具调用或 LLM 推理。
- 第三步,也是容易被忽略的关键,每执行完一步,会有一个 Re-planner(重新规划器)回顾当前进展,判断原来的计划还适不适用,如果中间发现了新的信息或者某步执行结果不符合预期,就动态调整后续步骤。
这个模式和 ReAct 是什么关系?ReAct(Reasoning + Acting)是一种让 LLM 在每一步都先「思考」再「行动」再「观察」的循环模式,它的特点是每步都是即时决策,没有提前规划。Plan-and-Execute 则是在 ReAct 的基础上加了一层全局规划,你可以理解成 ReAct 负责每一步怎么执行,Plan-and-Execute 负责这些步骤的整体编排和动态调整。两者不是替代关系,而是经常搭配使用的。
工程上 Plan-and-Execute 的好处很明显:规划和执行分离之后,规划阶段可以用更强的模型(比如 GPT-4)来保证方向正确,执行阶段可以用更快更便宜的模型来提高效率,成本和质量都能分别优化。LangGraph 里就内置了这种模式的支持,用起来相当方便。
🎯 面试总结
回顾开头踩的雷,第一个最典型:把「CoT 就是规划能力」画等号,这是这道题最常见的误区。规划能力是个方向,CoT 只是最基础的一种实现手段。
答好这道题有几个层次。
首先要说清楚为什么需要规划能力,LLM 默认「一口气」生成答案,没有显式推理过程,多步推理任务容易跳步出错,规划机制就是把隐式推理过程显式化。
然后要说三种机制的演进逻辑:CoT 解决「要不要把推理写出来」,ToT 解决「走错了方向怎么纠偏」,GoT 解决「不同路径的中间结论能不能复用」,每一个都是针对上一个的局限性改进。
最容易被忽略的考点是工程取舍:CoT 几乎零成本;ToT 效果更好但典型调用次数是 CoT 的 3-5 倍(具体看路径数和深度),要明确说出这个数字;GoT 目前学术阶段,生产环境没有成熟落地。
面试里如果能把工程成本和适用场景说清楚,比只讲原理要加分得多。
对了,AI Agent的面试题会在「公众号@小林面试笔记题」持续更新,林友们赶紧关注起来,别错过最新干货哦!
